


4月16日9時06分,北京航天飛行控制中心通過地面觀測站發出返回指令,神舟十三號載人飛船軌道艙與返回艙成功分離。9時56分,返回艙在東風著陸場成功著陸。11時05分,三位航天員全部安全順利出艙。空間站關鍵技術驗證階段任務圓滿完成。
由青島理工大學機械與汽車工程學院復雜網絡與可視化研究所航天可視化團隊自主研發的“深空探測三維實時可視化技術”為神舟十三號載人飛船返回艙凱旋護航,精準實時展示姿態調整、軌返分離以及推返分離過程,實現整個任務過程的三維實時可視化,為地面控制人員的關鍵動作實施和操控指揮提供決策支持。
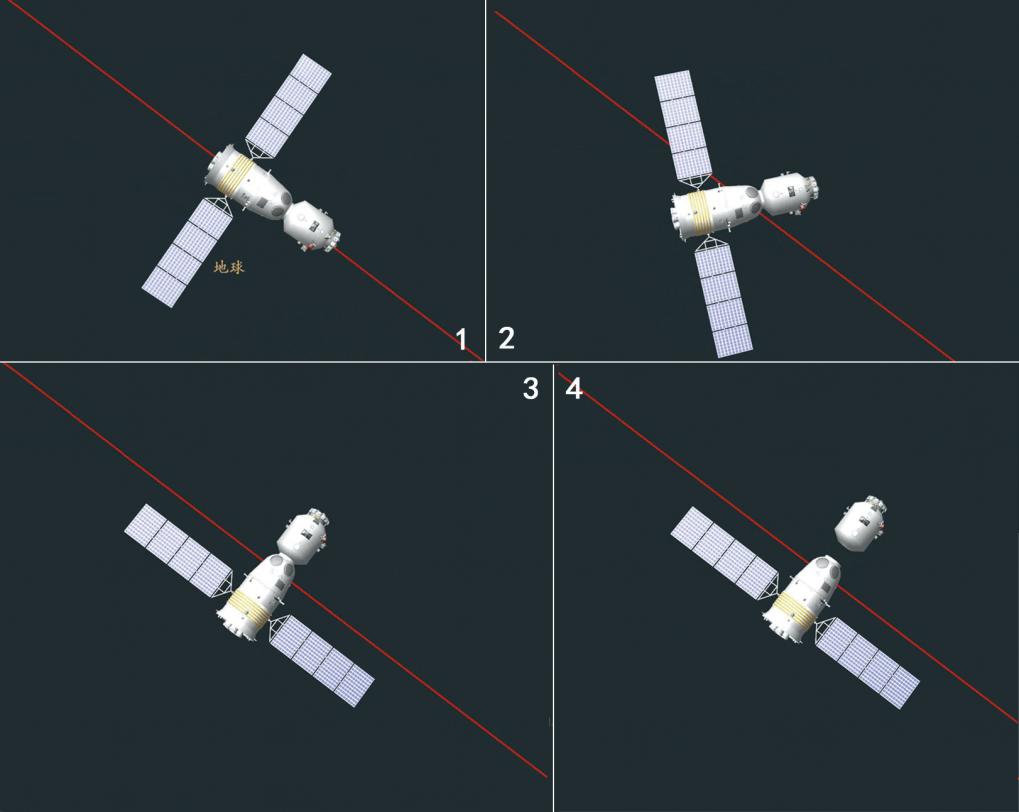
神舟十三號載人飛船進行姿態調整、軌返分離
神舟十三號載人飛船于2021年10月16日從酒泉衛星發射中心發射升空,與天和核心艙快速對接,航天員進行為期6個月的“太空出差”,最后成功返回地球并著陸。青島理工大學航天可視化團隊自主研發的“深空探測三維實時可視化”技術一直都在為此次任務執行全過程、全方位守護。
青島理工大學復雜網絡與可視化研究所航天可視化團隊具有豐富的航天工程實戰任務保障經驗,在神舟十二號載人飛船任務過程中就已經發揮過關鍵作用,這也是該團隊第42次參加國家航天工程。(青島日報社/觀海新聞記者 楊海濤 通訊員 盧石磊 王妍)
責任編輯:楊海濤
