


觀海新聞記者1月6日從青島理工大學了解到,繼“嫦娥五號”任務之后,青島理工大學復雜網絡與可視化研究所又為“天問一號”火星探測任務保駕護航!
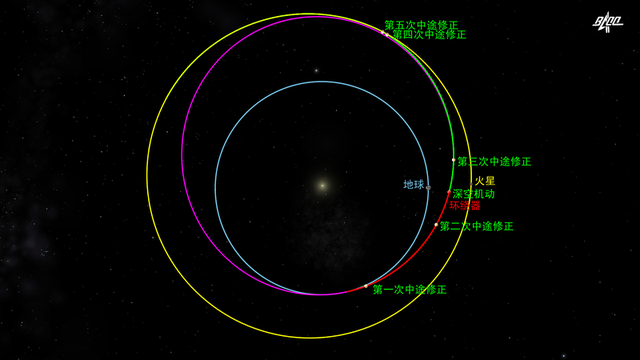
截至1月3日6時,“天問一號”探測器已經在軌飛行163天,飛行里程突破4億公里,距離地球約1.3億公里,距離火星約830萬公里,飛行狀態良好。按計劃,探測器將在一個多月后實施近火制動,進入環火軌道,準備著陸火星。

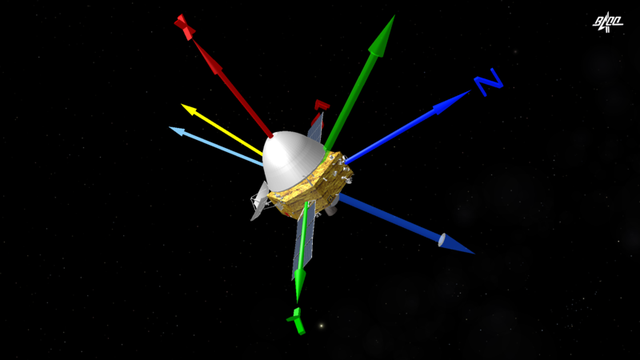
系統截圖
青島理工大學復雜網絡與可視化研究所航天可視化團隊多年來研發的空間時實三維可視化技術在北京航天飛行控制中心為“天問一號”探測器的飛行控制與指揮保駕護航,相關系統運行正常。
航天可視化團隊此前先后參與并圓滿完成多項深空探測、載人航天等國家重大航天工程實戰任務,主要包括探月工程嫦娥二號、三號、四號、五號任務的可視化飛行控制指揮與遙操作操控任務,載人航天工程天宮一號與神舟八號、九號、十號,天宮二號與神舟十一號交會對接任務的可視化飛行控制指揮任務。
新聞相關:
把宇宙深空“拉近”并再現!
青島理工大學復雜網絡與可視化研究所為“嫦娥五號”任務保駕護航
2020年11月24日4時30分,“長征五號”遙五運載火箭在中國文昌航天發射場點火升空,將運送“嫦娥五號”探測器至地月轉移軌道。“嫦娥五號”此次承擔的任務是獲取月球樣品返回地球,是我國航天領域迄今最復雜、難度最大的任務之一。
在“嫦娥五號”任務中,青島理工大學復雜網絡與可視化研究所航天可視化團隊研制的探月工程三期遙操作作業平臺再次發揮關鍵性作用,并接受嚴格的實戰任務考驗。 探月工程三期遙操作作業平臺是航天可視化團隊研發的空間三維時實可視化及遙操作系統的子系統,是北京航天飛行控制中心的常態化測控應用系統,在月面工作段為地形建立、視覺定位、路徑規劃、任務規劃、活動機構規劃、規劃驗證等配置項提供信息顯示和業務作業平臺,已在“嫦娥四號”探測器月球背面軟著陸及“玉兔二號”月面巡視遙操作操控任務中成功應用。 航天可視化團隊此前先后參與并圓滿完成多項深空探測、載人航天等國家重大航天工程實戰任務,主要包括探月工程嫦娥二號、嫦娥三號、嫦娥五號T1飛行試驗器、嫦娥四號任務的可視化飛行控制指揮與遙操作操控任務,載人航天工程天宮一號與神舟八號、神舟九號、神舟十號,天宮二號與神舟十一號交會對接任務的實時三維可視化任務。

航天測控三維實時可視化系統

新聞人物:
趙正旭與“復雜網絡與可視化研究所創新團隊”
趙正旭教授,博士生導師,英國皇家學會工藝院院士,教育部第四批長江學者特聘教授。1992年獲英國皇家學位部CNAA計算機專業博士學位之后獲英國Newcastle大學應用計算機專業博士后,英國科學博士(DSc);現任聯合國開發署高級技術顧問,世界計算機學會技術委員會評審委員,中國北京航天飛行控制指揮中心特聘專家,中華全國歸國華僑聯合會特聘專家,中國人民解放軍總裝備部某部車輛試驗研究所特聘顧問專家,中國國防科技實驗室專家庫成員,教育部科技發展中心專家庫成員等。趙教授先后參與載人航天、探月工程及深空探測等多項工程的可視化航天科技攻關工作,承擔和主持了多項國家重大航天研究課題、科技攻關項目與國家自然基金課題;主要從事計算機圖形學、虛擬現實技術、虛擬仿真、小世界網絡系統的研究,是虛擬現實技術領域中的國際知名學者。
趙正旭教授領銜的“復雜網絡與可視化研究所創新團隊”,服務國家兩大航天工程—載人航天和探月工程,團隊先后承擔國家自然科學基金項目,國防“十三五”預研項目等國家、省部級項目;參與國家載人航天(921)工程和深空探測工程中天宮一號與神舟八號、九號、十號交會對接任務,天宮二號與神舟十一號交會對接任務,探月工程嫦娥二號、三號、四號、五號任務,長征七號及天舟一號任務等近30次工程實戰任務,有二十多年的航天工程行業背景;團隊為中國科學院國家天文臺國家重大科研基礎設施FAST(中國天眼)構建實時三維可視化控制系統;已形成一套具有完整自主知識產權的,集實時仿真控制、數據處理和信息可視化功能于一體的可視化航天項目實施系統平臺及技術規范。
(青島理工大學融媒體中心 復雜網絡與可視化研究所 通訊員/曹玉潔)
責任編輯:楊海濤
